Ridge-iでは、手の動きに合わせて直感的に遠隔操作できるロボットアームの技術開発を行っております。
手の動きに合わせて遠隔操作
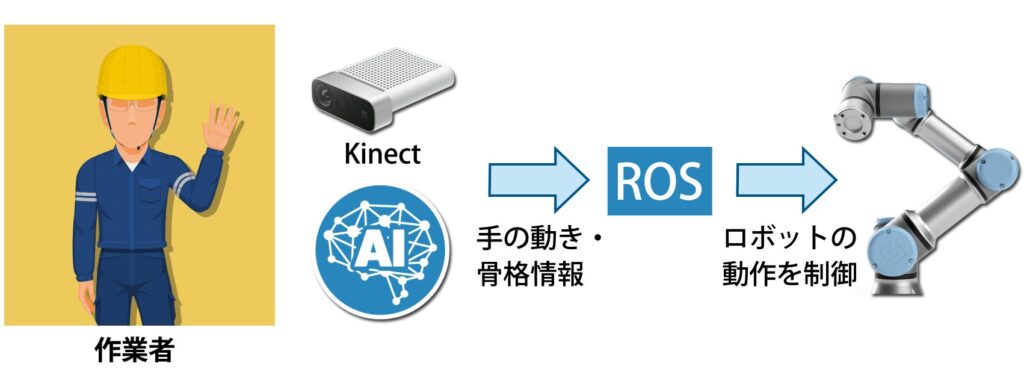
ここでは、Kinectと呼ばれるトラッキングセンサーとAIカメラを活用して、手の位置と骨格を推定し、その情報をROSに伝達することで、作業者の手の動きに合わせてロボットアームの動作を制御することができます。
現場業務のリモートワーク実現へ
コロナ禍によりリモートワークが推奨される一方で、工場での組み付け作業など、その場でものを動かさなければいけない現場業務ではリモートワークが難しいという課題がありました。
直感的なロボットの遠隔操作を可能とすることで、テレロボティクスの普及と現場業務のリモートワーク実現を目指します。